Feedback Control Systems: Systems Specifications
Not what you're looking for?
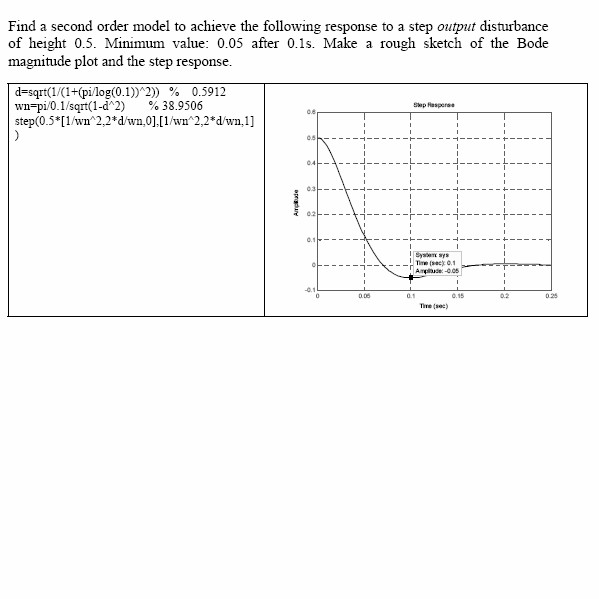
Find a second order model to achieve the following response to a step output disturbance of height 0.5. Minimum value 0.05 after 0.1s. Make a rough sketch of the bode magnitude plot and the step response.
(Please see attachments for details.)
{kind=link}
{kind=link}
Purchase this Solution
Solution Summary
In 560 words, this solution provides a step-by-step response which clearly indicates how to approach this feedback control system problem.
Solution Preview
Posting 23525:
Ty/do is high-passing
Note from then class notes you attached:
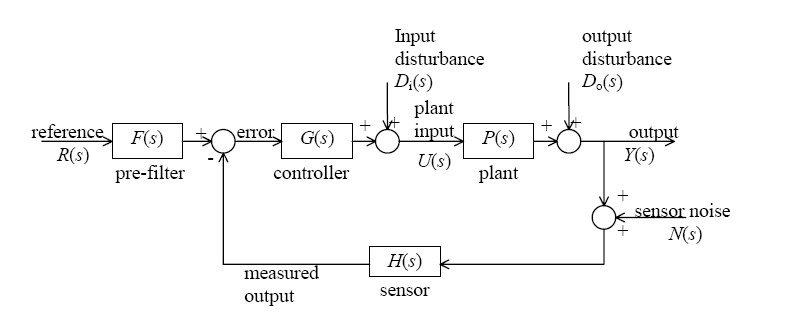
Ty/di = P/(1+L), since P* = P
Ty/do = 1/(1+L), since P* = 1
and hence, Ty/do = [Ty/di]/P
Typically P(s) = k/(s+a)
----------------------------------------------
Now, we know from previous postings and the normalized curves,
Ty/di is of the form:
Ty/di = bs/[s^2 + cs +d ]
Now, Ty/do = [Ty/di]/P
= bs/[s^2 + cs +d ]/[k/(s+a)]
= (s+a)(bs)/[k{s^2 + cs +d}]
= (bs^2+abs)/[k{s^2 + cs +d}]
This is the general form ofn the TF.
----------------------------------------------------------
Find a second-order model:
Step output disturbance of height 0.5
Output: Minimum value: 0.05 after 0.1 Sec
If d is the damping coefficient and Wn is the undamped angular velocity (in rad/sec),
Transfer function from output disturbance to output:
Y(s)/Do(s) = s*(s+2dWn)/[s^2 + 2dWn*s + Wn^2]
do = 0.5U(t)
Do(s) = 0.5/s
Hence, Y(s) = ...
Purchase this Solution
Free BrainMass Quizzes
Basic Physics
This quiz will test your knowledge about basic Physics.
Classical Mechanics
This quiz is designed to test and improve your knowledge on Classical Mechanics.
Intro to the Physics Waves
Some short-answer questions involving the basic vocabulary of string, sound, and water waves.
The Moon
Test your knowledge of moon phases and movement.
Variables in Science Experiments
How well do you understand variables? Test your knowledge of independent (manipulated), dependent (responding), and controlled variables with this 10 question quiz.