Closed Loop Control Systems
Not what you're looking for?
2. a) In this question you have to determine the closed loop transfer function and then use the characteristic equation to determine the closed loop poles (roots) of the system. Prove that the closed loop transfer function is given by:
C(s)/R(s) = G(s)/(I + G(s)H(s))
b) What is the significance of the characteristic equation? i.e. 1 + G(s)H(s) = 0.
c) A control system has a feed forwad loop of G(s) = (K_p)/(s^2 + 10s) and a feed back Loop of H(s) = 1. Determine the roots fo the characteristic equation when K_p = 16, 25 and 50 and draw the position of the roots on the s plane. For each root pattern sketch its associated time domain response to a step input. If possible, us SIMULINK to verify which gain gives the over-damped, critically damped and under-damped response.
d) Briefly explain the advantages and disadvantages associated with closed loop control systems. Cite an example of an open and closed loop control system.
3. a) In this question you are being asked to select values for K_p and K_t to satisfy some design criteria. Prior to this you much explain the following terms using sketches to support your answers:
- Damping ration
- maximum overshoot
- peak time
- rise time
- settling time
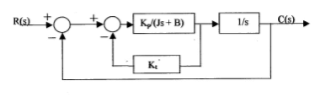
b) For the system show in the figure attached, determine its closed loop transfer function and subsequently explain what the inner loop with the feedback gain L, does.
c) When J = I Kg-m^2 and B = 1 N/ms, determine the values of feed forward gain K_p and feedback gain K_t to satisfy the following design requirements.
Maximum overshoot M_p = 0.2
Peak time t_p = 1 sec
d) What will be the system's 2% settling time where,
The maximum overshoot is given by M_p = e^-x and x = (damping ratio * pi)/sqrt(1 - damping ratio^2)
The peak time is given by t_p = pie/[(w_n)sqrt(1-damping ratio^2)]
The 2% settling time is given by t_p = 4/(damping ration * w_n)
Standard form of the second order system C(s)/R(s) = (w_n)^2 / [(s^2) + 2(damping ration * w_n * s) + (w_n)^2]
{kind=link}
Purchase this Solution
Solution Summary
This solution includes a graph of (1) Root positions in s plane, (2) step responses, and (3) Illustration of performance indexes. The simulink file is attached as Q37030.mdl and the related matlab file is Q370302c.m, which can be run directly. The discussion is 744 words. All calculations are formatted in the attached Word document.
Purchase this Solution
Free BrainMass Quizzes
Air Pollution Control - Environmental Science
Working principle of ESP
Architectural History
This quiz is intended to test the basics of History of Architecture- foundation for all architectural courses.