Stable Control Systems
Not what you're looking for?
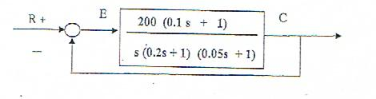
1. a. Draw the Bode diagram for the attached system.
b. Is the system stable?
2. Robots can be used in manufacturing and assembly operations where accurate, fast and versatile manipulation is required. The open-loop transfer function of a direct-drive arm may be approximated by:
G H (s) = K(s+2) / s(s+5)(s^2+2s+5)
a. Determine the value of gain K when the system oscillates.
b. Calculate the roots of the closed-loop system for the K determined in part a)..
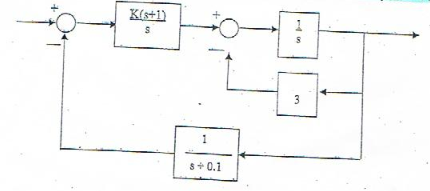
3. For the system attached, determine the range of K for which the system is stable.
{kind=link}
{kind=link}
Purchase this Solution
Solution Summary
This solution provides steps to determine each of the problems involving stable control systems.
Solution Preview
Please see attachments for full solutions.
1. a. To derive the Bode plots for amplitude and phase we need to find the poles and zero's of the closed loop transfer function.
b. In order to check the stability of the system we need to examine the characteristic equation of the denominator of the closed loop transfer function, ...
Purchase this Solution
Free BrainMass Quizzes
Architectural History
This quiz is intended to test the basics of History of Architecture- foundation for all architectural courses.
Air Pollution Control - Environmental Science
Working principle of ESP