Finite Mathematics - Linear Programming and then Simplex Method
Not what you're looking for?
Please do parts (a) and (b).
Please see the attached file for the fully formatted problems.
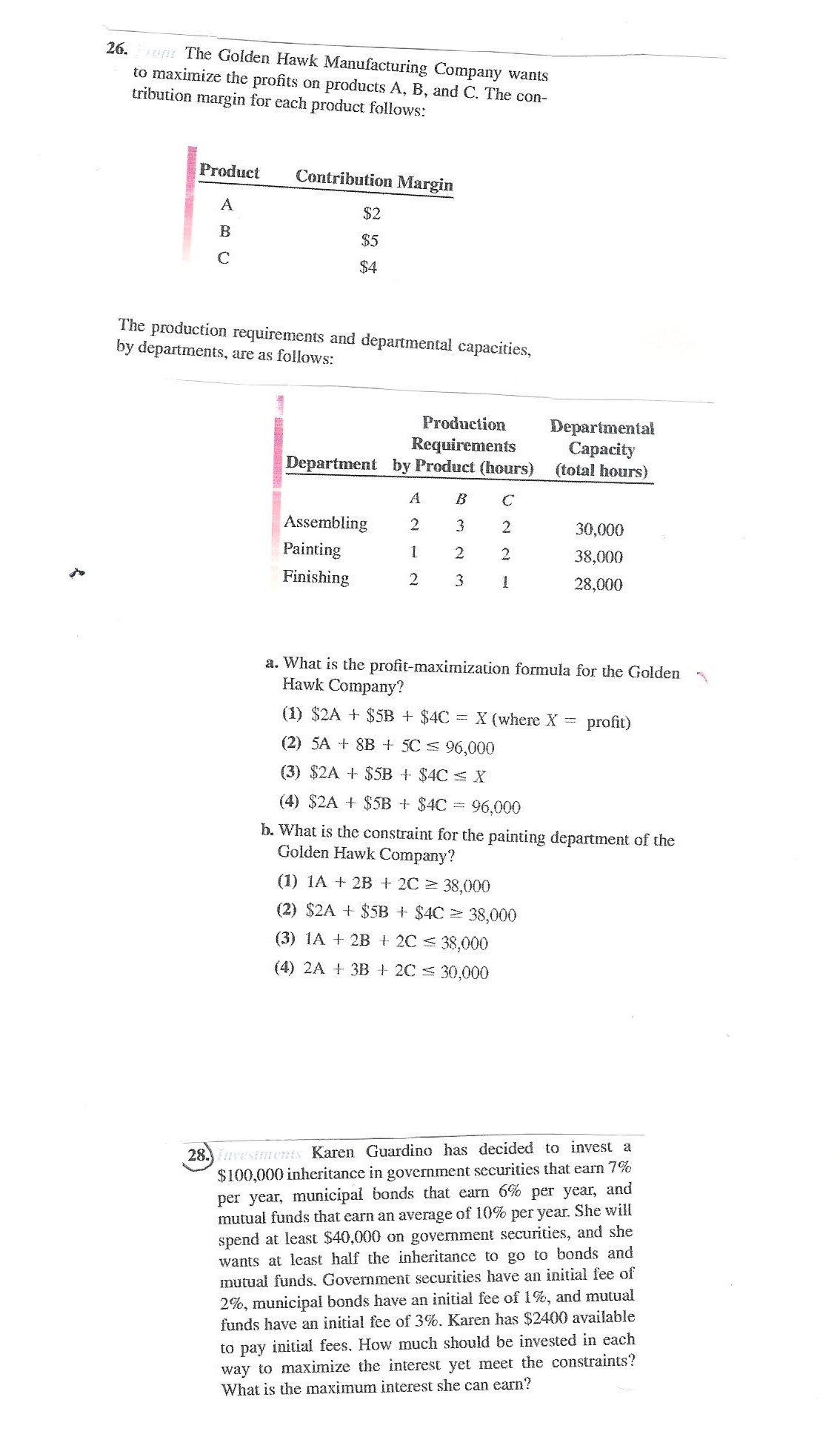
The Golden Hawk Manufacturing company wants
maximize the profits on products A, B, and C. The contribution margin for each product follows:
....
The production requirements and deprtmental capacities by departments, are as follows:
....
a. What is the profit-maximization formula for the Golden Hawk Company?
....
b. What is the constraint for the painting department of the Golden Hawk Company?
...
{kind=link}
Purchase this Solution
Solution Summary
The expert examines linear programming and then simplex methods for finite mathematics. A complete, neat and step-by-step solution is provided in the attached file.
Purchase this Solution
Free BrainMass Quizzes
Know Your Linear Equations
Each question is a choice-summary multiple choice question that will present you with a linear equation and then make 4 statements about that equation. You must determine which of the 4 statements are true (if any) in regards to the equation.
Solving quadratic inequalities
This quiz test you on how well you are familiar with solving quadratic inequalities.
Geometry - Real Life Application Problems
Understanding of how geometry applies to in real-world contexts
Probability Quiz
Some questions on probability
Multiplying Complex Numbers
This is a short quiz to check your understanding of multiplication of complex numbers in rectangular form.