Nyquist, Bode Plot and Root Locus
Not what you're looking for?
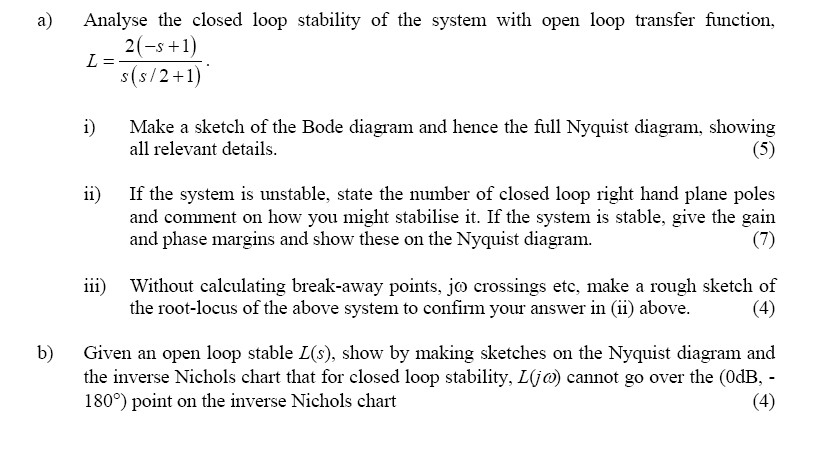
A) Analyse the closed loop stability of the system with open loop transfer function {see attachment}
i)Make a sketch of the Bode diagram and hence the full Nyquist diagram, showing all relavent details
ii) If the system is unstable, state the number of closed loop right hand plane poles and comment on how you might stabilise it. If the system is stable, give the gain and phase margins and show these on the Nyquist diagram
iii) Without calculating break-away points, jw crossings etc, make a rough sketch of the root-locus of the above system to confirm your answer in (ii) above.
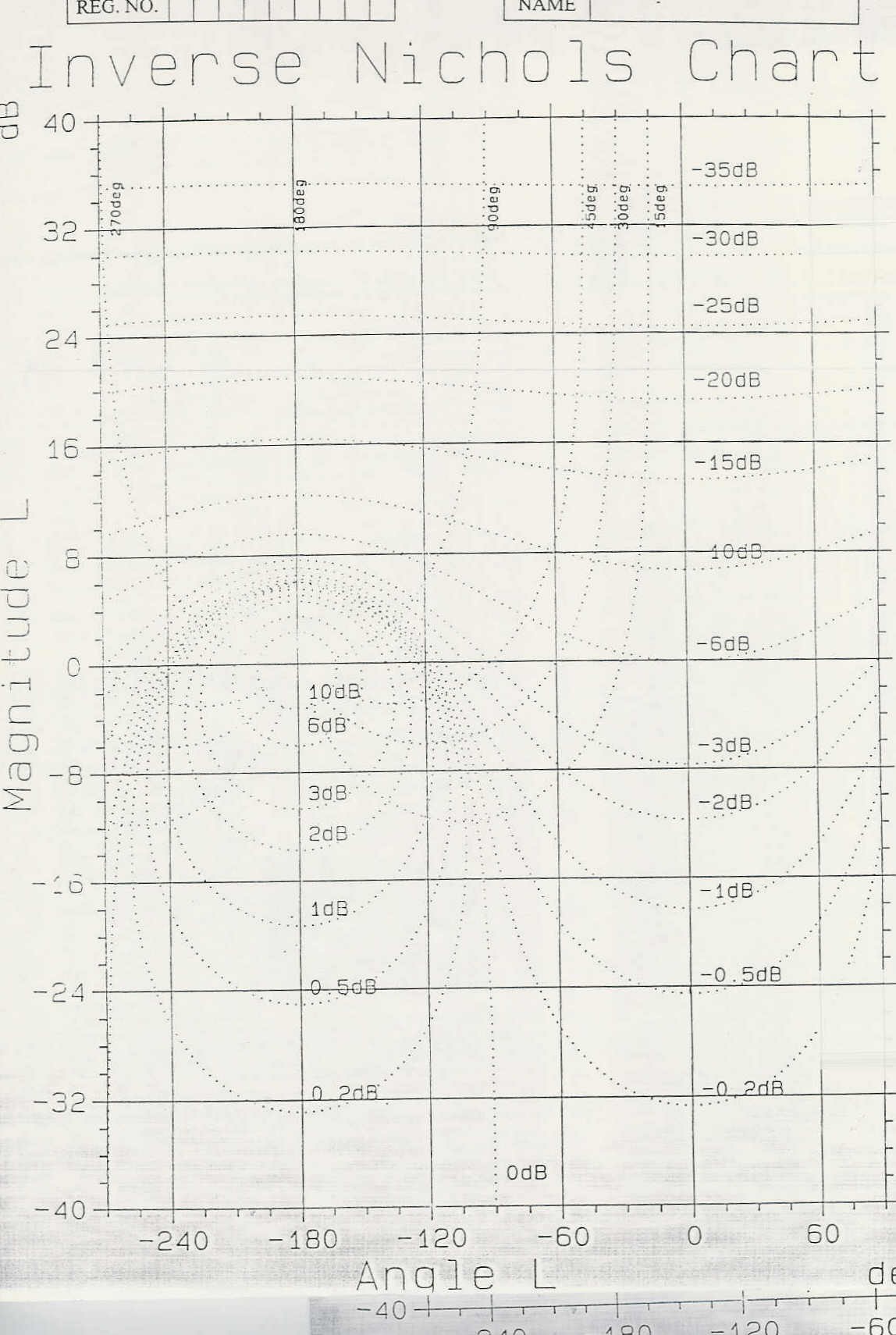
b) Given an open loop stable L(s), show by making sketches on the Nyquist diagram and the inverse Nichols chart (attached) that for closed loop stability, L(jw) cannot go over the {see attachment} point on the inverse Nichols chart.
*Please see attachments for chart and proper citation of symbols.
{kind=link}
{kind=link}
Purchase this Solution
Solution Summary
This solution is provided in a 5 page, 591 word .doc file attached. It gives the transfer function, bode diagram, nyquist plot, and root locus. Finally, a Nichols chart is provided and explained.
Solution Preview
Please refer to the attached file. There is a good explanation with necessary Matlab plots. The answer is given assuming the student has basic understanding of the material and the methods, for example: drawing root locus, bode plot and Nyquist diagrams.
(a)
(i)
Transfer function:
-2 s + 2
-----------
0.5 s^2 + s
Bode plot:
There is right hand plane zero at 1 and two poles at 0 and 2. The constant is 2 which equals to 6.02 dB and since there is pole at origin and RHP zero, the bode plot starts at 20+20+6.02= 46.02dB.
Then for the pole at 0 the plot starts falling with a slope of -20dB/dec. For the RHP zero at 1, the plot starts rising with a slope of 20dB/dec. Then again for pole at 2, the plot keeps falling with a slope of -20dB/dec.
The close pole and RHP zero location at 1 and 2 kind of cancels each other affect and the final plot keeps falling with a slope of ...
Purchase this Solution
Free BrainMass Quizzes
Air Pollution Control - Environmental Science
Working principle of ESP
Architectural History
This quiz is intended to test the basics of History of Architecture- foundation for all architectural courses.