Tilted Rigid Disk Rolling Without Slipping
Not what you're looking for?
The figure is attached as file.
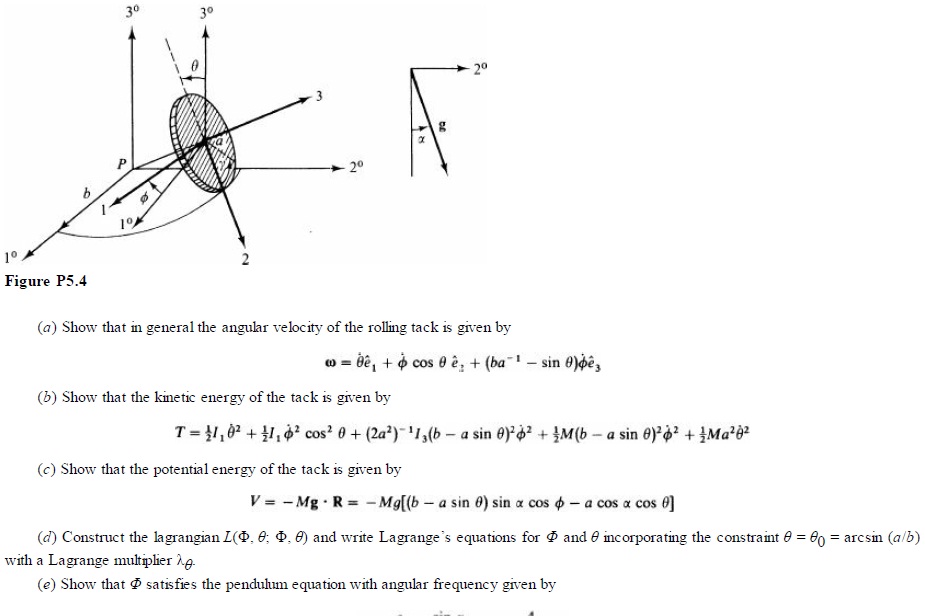
A rigid body in the shape of a thumbtack formed from a thin disk of mass M and radius a and a mass-less stem is placed on an inclined plane that makes an angle α with the horizontal. The point of the tack remains stationary at the point α, and the head rolls along a circle of radius b.
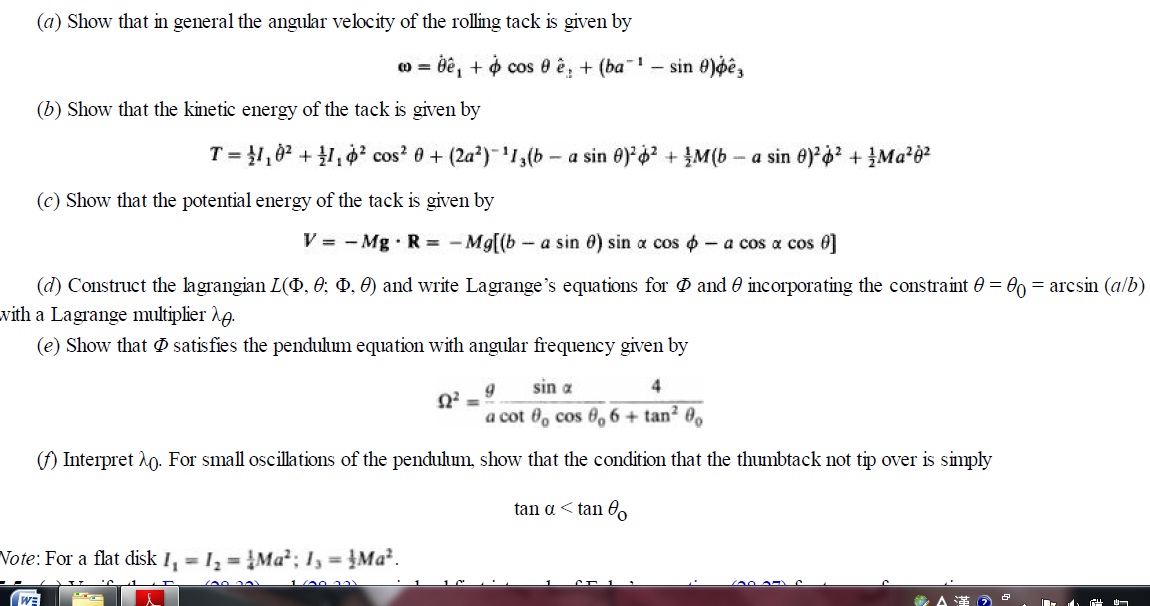
Introduce a set of laboratory coordinates whose 3° axis is perpendicular to the inclined plane and whose 2° axis points down the plane, as well as a set of body-associated principal axes with origin at the center of mass, whose 3 axis is perpendicular to the head of the tack pointing outward, whose 2 axis passes through the point of contact with the plane, and whose 1 axis is parallel to the surface and tangent to the circle. Introduce also the set of angles (θ, Φ, γ) that specify the orientation of the tack, as indicated in Fig. P5.4.
{kind=link}
{kind=link}
Purchase this Solution
Solution Summary
A rigid body rotational mechanics problem is solved to help a candidate, unable proceed.
Solution Preview
(a)
Angular velocities with respect to three principal axes (1,2,3,) in terms of Euler angles are given as:
w1 = phi_dot * sin(theta)*sin(gamma) + theta_dot * cos(gamma)
w2 = phi_dot * sin(theta)*cos(gamma) - theta_dot * sin(gamma)
w3 = phi_dot * cos(theta) + gamma_dot
Here point to be noted that, these equations are corresponding to theta between 3 and 3o, while in the ...
Education
- BEng, Allahabad University, India
- MSc , Pune University, India
- PhD (IP), Pune University, India
Recent Feedback
- " In question 2, you incorrectly add in the $3.00 dividend that was just paid to determine the value of the stock price using the dividend discount model. In question 4 response, it should have also been recognized that dividend discount models are not useful if any of the parameters used in the model are inaccurate. "
- "feedback: fail to recognize the operating cash flow will not begin until the end of year 3."
- "Answer was correct"
- "Great thanks"
- "Perfect solution..thank you"
Purchase this Solution
Free BrainMass Quizzes
Basic Physics
This quiz will test your knowledge about basic Physics.
The Moon
Test your knowledge of moon phases and movement.
Intro to the Physics Waves
Some short-answer questions involving the basic vocabulary of string, sound, and water waves.
Classical Mechanics
This quiz is designed to test and improve your knowledge on Classical Mechanics.
Variables in Science Experiments
How well do you understand variables? Test your knowledge of independent (manipulated), dependent (responding), and controlled variables with this 10 question quiz.