Inverted Pendulum with Counterweights - Equations of Motion
Not what you're looking for?
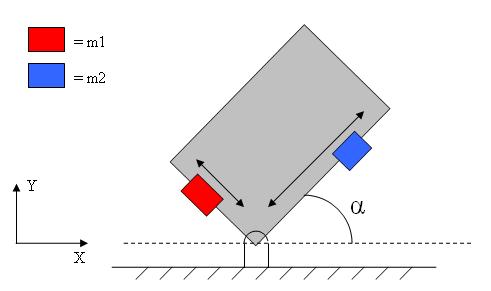
Could someone help me to derive the equations of motions for the system shown in the attach file. Basically it's a 2-dimensional "box" which should be stabilized on its rotating(pin) joint by adjusting counterweights m1 and m2 with linear motors. Counterweights m1 and m2 can move of speed v1 and v2 respectively. We can assume the box and the linear motors themselves doesn't weight anything here. Angle alfa can have values from 0 to 90 degrees.
Any help would be much appreciated.
See the attached file.
{kind=link}
Purchase this Solution
Solution Summary
The solution assists with deriving the equations of motions for the system.
Solution Preview
The explanations are IN THE ATTACHED PDF file and JPG SKETCH (based on your original), including the requested equation of motion and equilibrium point, and in addition the linearized approximation of the equation of motion in case it may be needed.
For possible reference by Brainmass, I also past in the TEX script from which the pdf was produced - you do not have to read it as you already have the pdf file.
=======
Here is the plain TEX source
centerline{bf Box equations of motion}
Let the point of support of the box be $O$, the distance from $O$ to $m_1$ be $z_1$, the distance from $O$ to $m_2$ be $z_2$, the distance from $O$ to the center of mass (COM) of the box be $D$, and the angle between the direction $O-COM$ and the direction $O-z_1$ be $beta$,
as indicated in the attached sketch.
Box 1 moves with speed $v_1(t) = dot z_1(t)$ along its edge of the box
and box 2 moves with speed $v_2(t) = dot z_2(t)$ along its edge,
where $t$ is time.
Let the mass of the box be $m_3$ and its moment of inertia be $I_3$.
Let us now construct the Lagrangian of the system.
The angular ...
Purchase this Solution
Free BrainMass Quizzes
The Moon
Test your knowledge of moon phases and movement.
Intro to the Physics Waves
Some short-answer questions involving the basic vocabulary of string, sound, and water waves.
Introduction to Nanotechnology/Nanomaterials
This quiz is for any area of science. Test yourself to see what knowledge of nanotechnology you have. This content will also make you familiar with basic concepts of nanotechnology.
Basic Physics
This quiz will test your knowledge about basic Physics.
Variables in Science Experiments
How well do you understand variables? Test your knowledge of independent (manipulated), dependent (responding), and controlled variables with this 10 question quiz.